


Company news
Online real-time news to know the first information of Motus

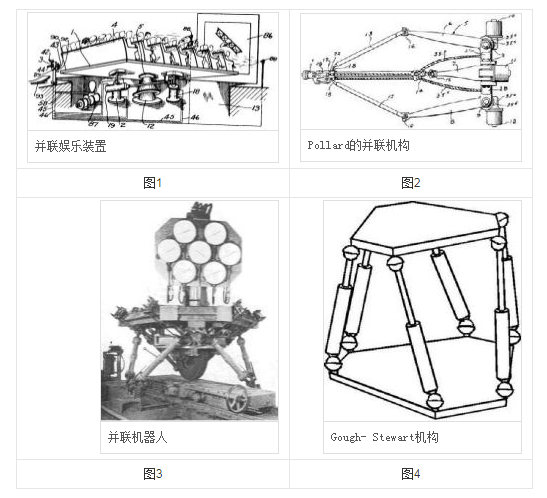
并联机构的出现可以回溯至20世纪30年代。
1931年,Gwinnett在其专利中提出了一种基于球面并联机构的娱乐装置(图1);1940年,Pollard在其专利中提出了一种空间工业并联机构,用于汽车的喷漆(图2);之后,Gough在1962年发明了一种基于并联机构的六自由度轮胎检测装置(图3);三年后,Stewart首次对Gough发明的这种机构进行了机构学意义上的研究,并将其推广应用为飞行模拟器的运动产生装置,这种机构也是目前应用最广的并联机构,被称为Gough-Stewart机构或Stewart机构(图4)
1965 年,德国Stewart 发明了六自由度并联机构,并作为飞行模拟器用于训练飞行员。1978年澳大利亚著名机构学教授Hunt提出将并联机构用于机器人手臂。
并联机构的特点:
(1)与串联机构相比刚度大,结构稳定;
(2)承载能力大;
(3)微动精度高;
(4)运动负荷小;
(5)在位置求解上,串联机构正解容易,但反解十分困难,而并联机构正解困难反解却非常容易。
由于机器人在线实时计算是要计算反解的,这对串联式十分不利,而并联式却容易实现。

从运动形式来看,并联机构可分为平面机构和空间机构;细分可分为平面移动机构、平面移动转动机构、空间纯移动机构、空间纯转动机构和空间混合运动机构,
另可按并联机构的自由度数分类:
(1 )2 自由度并联机构。
2 自由度并联机构,如5-R、3-R-2-P(R 表示转动副,P 表示移动副)平面5杆机构是最典型的2自由度并联机构,这类机构一般具有2 个移动运动。
(2 )3 自由度并联机构。
3 自由度并联机构各类较多,形式较复杂,一般有以下形式:平面3自由度并联机构,如3-RRR 机构、3-RPR 机构,它们具有2个移动和一个转动;球面3自由度并联机构,如3-RRR 球面机构、3-UPS-1-S 球面机构,3-RRR 球面机构所有运动副的轴线汇交空间一点,这点称为机构的中心,而3-UPS-1-S 球面机构则以S的中心点为机构的中心,机构上的所有点的运动都是绕该点的转动运动;3 维纯移动机构,如Star Like 并联机构、Tsai 并联机构和DELTA 机构,该类机构的运动学正反解都很简单,是一种应用很广泛的3维移动空间机构;空间3自由度并联机构,如典型的3-RPS 机构,这类机构属于欠秩机构,在工作空间内不同的点其运动形式不同是其最显著的特点,由于这种特殊的运动特性,阻碍了该类机构在实际中的广泛应用;还有一类是增加辅助杆件和运动副的空间机构,如德国汉诺威大学研制的并联机床采用的3-UPS-1-PU 球坐标式3 自由度并联机构,由于辅助杆件和运动副的制约,使得该机构的运动平台具有1 个移动和2 个转动的运动(也可以说是3个移动运动) 。
(3 )4 自由度并联机构。
4 自由度并联机构大多不是完全并联机构,如2-UPS-1-RRRR 机构,运动平台通过3 个支链与定平台相连,有2个运动链是相同的,各具有1 个虎克铰U ,1 个移动副P ,其中P 和1 个R 是驱动副,因此这种机构不是完全并联机构。
(4 )5 自由度并联机构。
现有的5 自由度并联机构结构复杂,如韩国Lee的5自由度并联机构具有双层结构(2 个并联机构的结合)。
(5 )6 自由度并联机构。

6 自由度并联机构是并联机器人机构中的一大类,是国内外学者研究得最多的并联机构,广泛应用在飞行模拟器、6维力与力矩传感器和并联机床等领域。但这类机构有很多关键性技术没有或没有完全得到解决,比如其运动学正解、动力学模型的建立以及并联机床的精度标定等。从完全并联的角度出发,这类机构必须具有6个运动链。但现有的并联机构中,也有拥有3 个运动链的6 自由度并联机构,如3-PRPS 和3-URS 等机构,还有在3 个分支的每个分支上附加1个5杆机构作这驱动机构的6自由度并联机构等。





